Enjoying a trip to thailand with my family from 14. september to 6th december.
Monthly Archives: September 2013
Public Blog of Teddy Robot
Hi folks !
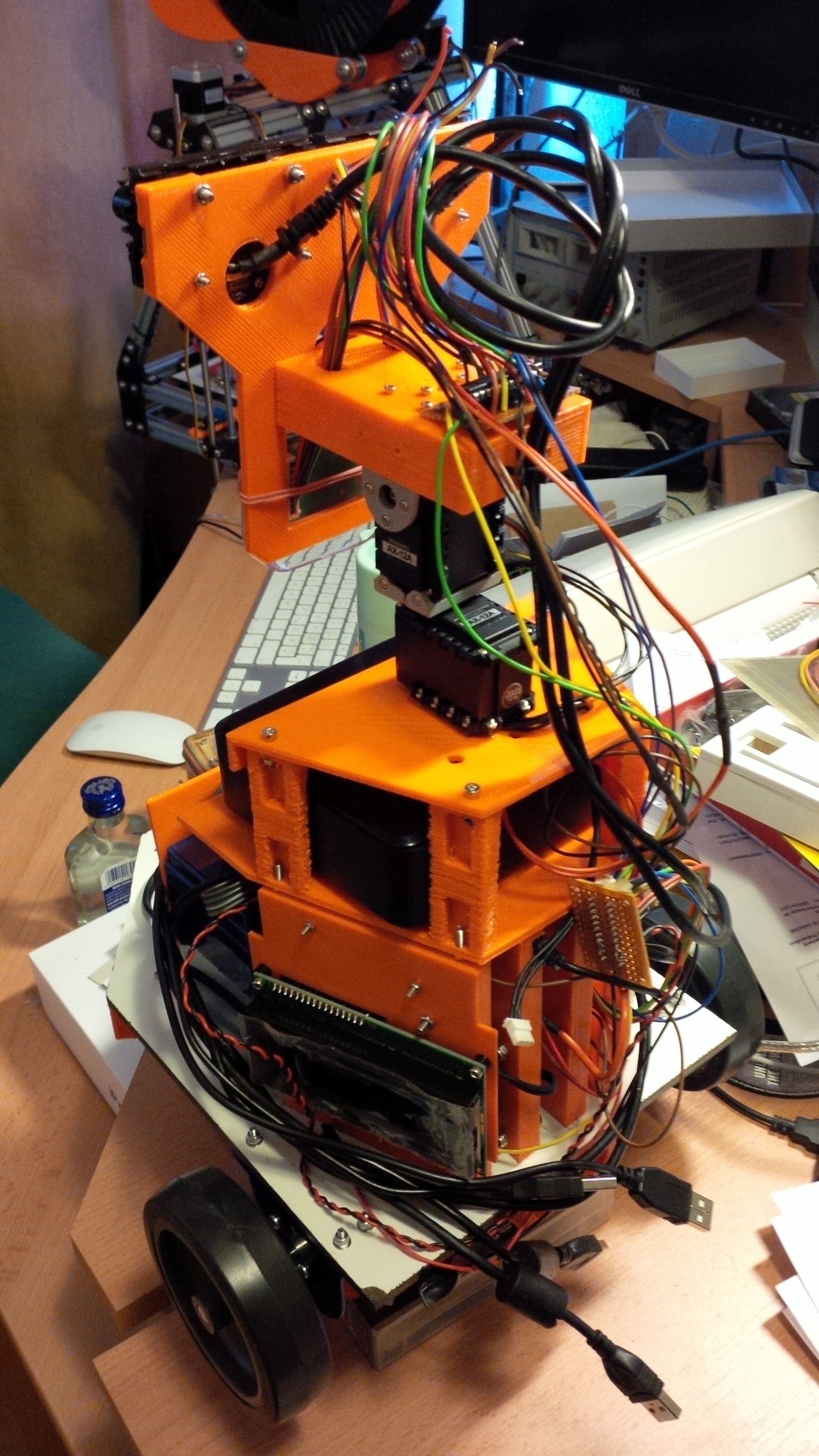
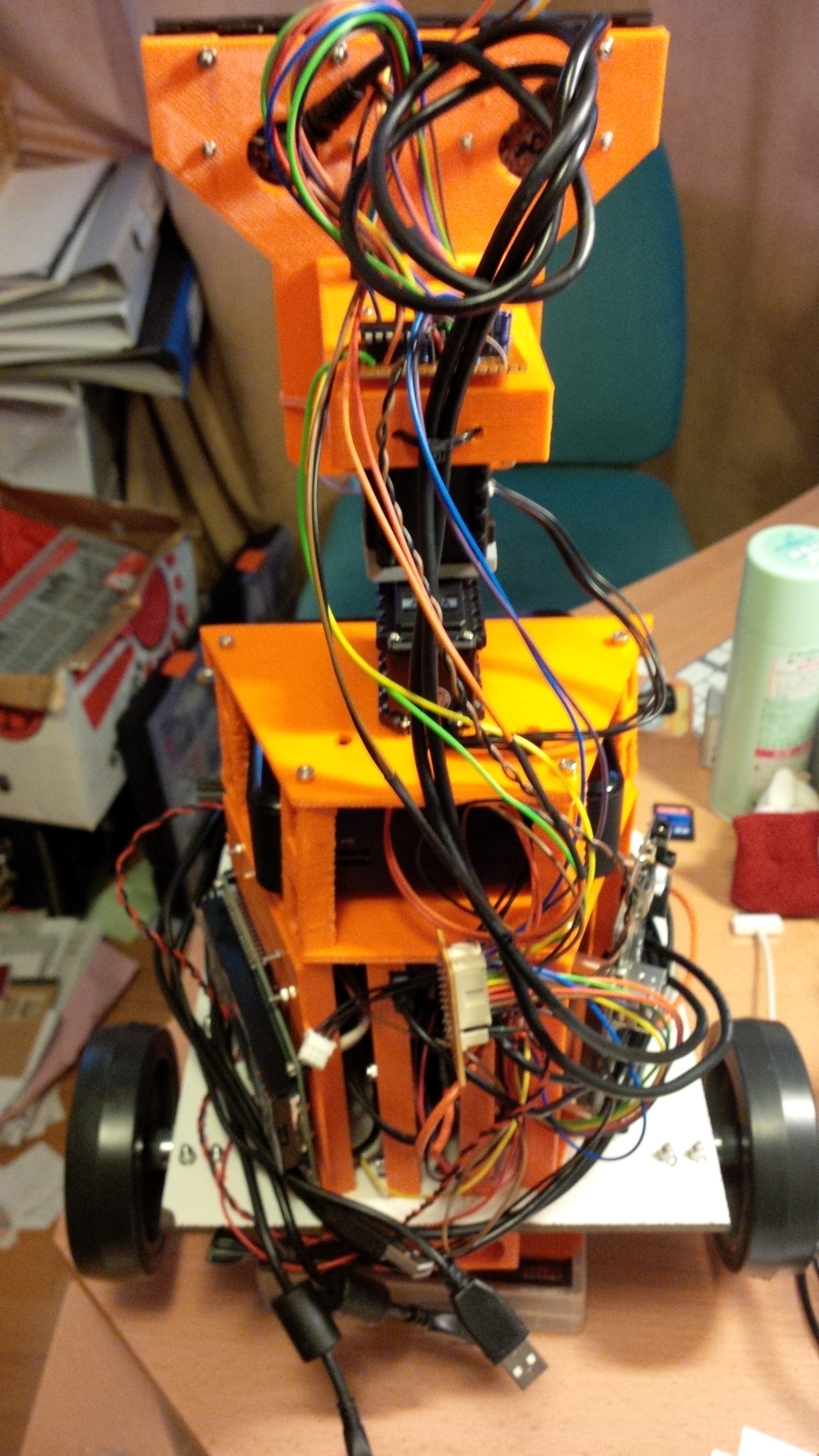
I finally set up a public blog to document the project steps on creating my tricycle riding teddy bear autonomous robot.


Since I started the blog as of today, september 12th 2013, I will create lots of entries back in time to restore some kind of order in the timeline of the previous development.
Have fun,
Kobaan.
Arduino ROS Library update to Hydro and TF/TF2 conversions
Reflashed Arduino with newest hydro ros_lib, and also converted some stuff from TF to TF2.
ROS Groovy to Hydro migration on Intel NUC
Just upgraded ROS from groovy to hydro on my Intel NUC x86-64.
Ubuntu Upgrade on Intel NUC
Upgrading from Ubuntu Quantal 12.10 to 13.04 Raring on my Intel NUC.
ROS Groovy to Hydro migration on Cubieboard
Just upgraded ROS from groovy to hydro on my Cubieboard ARMHF.
As read on the forums ros-hydro-roslisp fails due to a missing LISP compiler on ARMHF,
so I injected a fake package without this dependancy to get ros-hydro-ros-comm installed.
Kernel Upgrade to 3.4.43 on Cubieboard
Building Linux-Sunxi-Kernel 3.4.43 for Cubieboard and setup uboot-Image. Done.
Lubuntu Upgrade on Cubieboard
Upgrading from Lubuntu Precise 12.04 to 13.08 Raring on my Cubieboard.