Finally, whenever I tried to connect my 4 Pixycam for realtime coloured object tracking for the Teddy Robot, I experienced trouble wheter connecting them via USB (saturating the USB Host adapter bandwidth, or colliding due to a previously non-existing Pixycam Device enumeration), connecting them via serial or I2C to my micropython boards (bandwidth problem, not enough serial lines for 4 cameras), connecting them via SPI (previously no slave selection support on pixies).
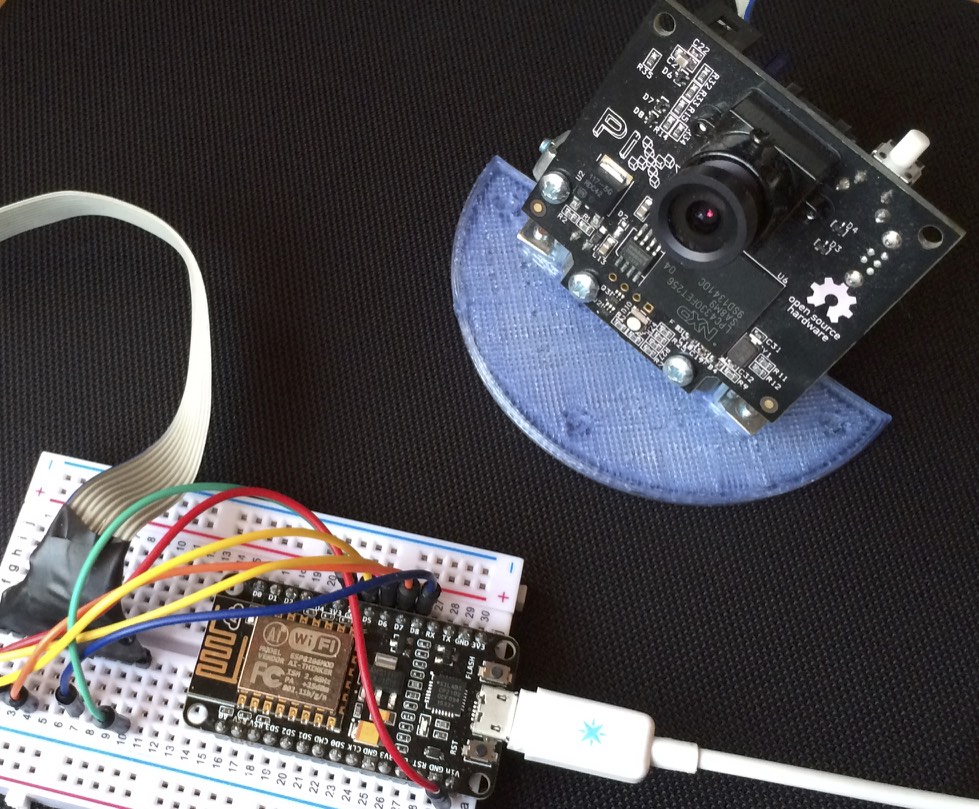
Now with the NodeMCU board and SPI SS support in the latest Pixycam firmware, I managed to run the color object tracking code on only one microcontroller querying 4 cameras via SPI on one bus in full speed and even transmitting all the block data via Wifi to a websocket server.
With slower arduino or even maple or micropython STM32 boards this would have never been possible.
The websocket server has a low enough latency of 2ms, which is great via WiFi. When trying to relay the same data via MQTT I got a lot of stack traces again. One day I need to directly embed ROSserial via WiFi to see if the websocket translation into ROS can be omitted.